The word "sensors" is a famous one. When someone hears it, they can immediately relate it to some high technology equipment and realize the reliability of a product. Today's modern technology uses several different sensors in a wide range of products and fields that it is tough to draw out our dependability on them. May it be mobiles, cars, automatic-taps, automatic-door, biometric sensors and a lot more. We may not notice nut they are playing a vital role in making our lives easier. And one such very advanced sensor is the Inertial Measurement Sensor, or more commonly known as IMU. Figure 1. (a) shows Apollo IMU, where Inertial Reference Integrating Gyros (IRIGs,Xg,Yg,Zg) sense attitude changes, and Pulse Integrating Pendulous Accelerometers (PIPAs,Xa,Ya,Za) sense velocity changes.

The term “IMU” refers to just the sensor, but technically its output comprises the output from three different types of sensors, namely Gyroscope, Magnetometer, and Accelerometer are used to calculate and report an exact force of body, angular rate as well as the direction of the body. So if someone tells you that your equipment is loaded with an IMU sensor just know that an entire army of sensors is in action for you. Also, recent developments allow the production of IMU-enabled GPS devices. An IMU allows a GPS receiver to work when GPS signals are unavailable, such as in tunnels, inside buildings, or when electronic interference is present.
This sensor fusion is done to estimate orientation by combining two or more data sources to generate a better understanding of the system. Multiple sensors/sources mean
More consistency.
More accurate data.
Better/more coverage.
Much more dependable than a single data source.
Increased quality of data due to lower noise.
Higher/better calibration.
Increased reliability.
Better estimation of unmeasured state.
How Does It Function?
An inertial measurement unit (IMU) measures and reports raw or filtered angular rate and specific force/acceleration experienced by the attached object. Data outputs for an IMU are typically body-frame accelerations, angular rates, and (optionally) magnetic field measurements. It functions by detecting linear acceleration using one or more accelerometers and rotational rate using one or more gyroscopes.
What is a accelerometer?
The accelerometer is used to test the motion acceleration of the carrier, which is then used to calculate the real-time location of the carrier. A device that measures the vibration or acceleration of motion of a structure. Accelerometers are used in vehicle Electronic stability control systems to measure the vehicle's actual movement.

What is a Gyroscope?
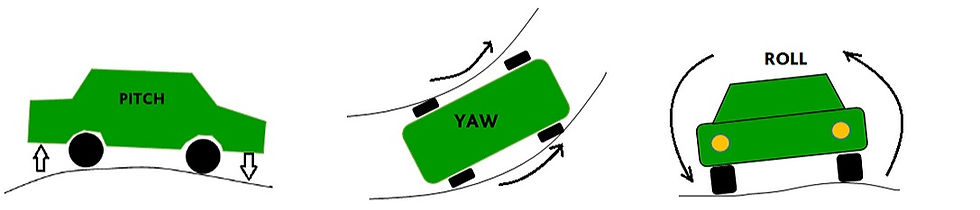
Gyroscopes, however, software, a gyro can be used to determine an object's orientation within 3D space. It measures angular velocity about three axes: pitch (x-axis), roll (y-axis), and yaw (z-axis). When integrated with sensor fusion, a device used to maintain a reference direction or provide stability in navigation, stabilizers, etc.
What is a magnetometer?
A magnetometer is used as a heading reference. They measure the direction, strength, or relative change of a magnetic field at a particular location.
IMUs comprise a 3-axis accelerometer and a 3-axis gyroscope, which would be considered a 6-axis IMU. (They can also include an additional 3-axis magnetometer, which would be regarded as a 9-axis IMU. The IMUs directly measure linear accelerations and rotational velocities, so their outputs are better than accelerations and velocities obtained by taking the time derivative of position data
Another important term to know is, "Gyro sensors" are the devices that sense angular velocity. Known as angular rate sensors or angular velocity sensors. (Angular velocity is the change in rotational angle per unit of time. Angular velocity is generally expressed in degrees per second).
Inland vehicles, an IMU can be integrated into GPS based automotive navigation systems or vehicle tracking systems. For example, giving the system a dead reckoning capability and the ability to gather as much accurate data as possible about the vehicle's current speed, turn rate, heading, inclination and acceleration, in combination with the vehicle's wheel speed sensor output and, if available, reverse gear signal, for purposes such as better traffic collision analysis.
Dead Reckoning
In dead reckoning, by using previously determined position, heading direction, estimations of speed data, and course over elapsed time, one can calculate the vehicle's (any moving object) current position. Dead reckoning is widely applied in inertial navigation systems, as it provides very accurate directional information. As evidently known and felt, Satellite microwave signals' availability is less or missing in tunnels, urban canyons, parking areas, and near trees due to blocked lines of sight to the satellites or multipath propagation. Today, high-end automotive navigation systems use dead reckoning to overcome the limitations of GPS/GNSS technology. Such cars are equipped with sensors that know the wheel circumference and record wheel rotations and steering direction. These sensors are often already present in cars for other purposes such as anti-lock braking system, electronic stability control. They can be read by the navigation system from the controller-area network bus.
At Influx, our ReXgen2 IMU version has similar characteristics. It consists of an internal accelerometer and gyroscope module. Acceleration output data rate is up to 6664 Hz with a vibration rate of ±2/±4/±8/±16 g at full scale. The angular output data rate of the gyroscope is up to 1666 Hz with ±125/±250/±500/±1000/±2000 dps at full scale. Influx Technology plans to roll out ReXgen and Rebel Series logger with support for Automotive Dead Reckoning using UBlox ADR Modules.
For more info on ReXgen2 IMU, Click here
Video below shows Rexgen2 IMU version
Comments